
Welcome to my website!

About Me
I am a fifth year Mechanical and Aerospace Engineering PhD student at UC San Diego, working under Prof. Boris Kramer. I have been working on efficient, scalable numerical methods for implementing nonlinear balanced truncation model reduction. Through that, my research broadened to the more general problem of scalable numerical methods for solving Hamilton-Jacobi-Bellman Partial Differential Equations, which naturally arise in nonlinear control theory. The success of linear control theory and linear model reduction stems directly from the availability of efficient, easy-to-use solvers; our goal is to develop these types of tools for nonlinear systems, since nonlinear, high-dimensional dynamical systems are ubiquitous throughout science and engineering. My current work on Kronecker product-based numerical methods for nonlinear balancing and nonlinear optimal control for high-dimensional systems can be found here on my GitHub!
My background is in Engineering Mechanics, which I studied during my BS and MS degrees at Virginia Tech. During this time, I was exposed to a variety of problems, ranging from curiosity-driven science to aerospace-application driven problems, such as through my design teams and my internship at Pratt & Whitney. Furthermore, my master’s work focused on vibration testing, specifically for railroad applications. Through all of these experiences, I was exposed to the need for general methods for efficiently simulating and analyzing complex engineering systems with features such as nonlinearity and complex geometry. This has motivated me to shift slightly towards the applied mathematics side of engineering to study model reduction methods during my PhD, which brought me to UCSD to work with Prof. Boris Kramer.
I plan on graduating in Spring 2026, after which I am looking for an industry position in controls engineering.
News
October 2025: I am visiting Virginia Tech in Blacksburg, VA for the rest of the year for potential collaborations with researchers in the math department. Primarily I’ll be working on computing nonlinear balancing transformations and eventually reduced-order models with Jeff Borggaard. A lot of my PhD work has been based on earlier work by Jeff and Lizette Zietsman (who was my professor for linear algebra in undergrad), so this was a good opportunity to visit and bring things full circle. While I am here though, I am open to other collaborations as well, so if there is any overlap, please reach out and let’s chat!
September 2025: I just completed my summer internship in the Plasma Controls group at ASML San Diego, where I worked on developing new models and control algorithms for the EUV light source. I had an incredible time working there this summer, and I hope to be able to return.
August 2025: I presented my work on the Polynomial-Polynomial Regulator problem at this year’s CCTA conference during the workshop on Learning, Estimation & Control for PDE Systems. Using efficient linear algebra, we are able to compute Taylor expansions of the optimal feedback law for very high-dimensional systems such as those arising from the semi-discretization of PDEs. Our PPR package therefore provides an efficient way for studying nonlinear control for these high-dimensional nonlinear systems.
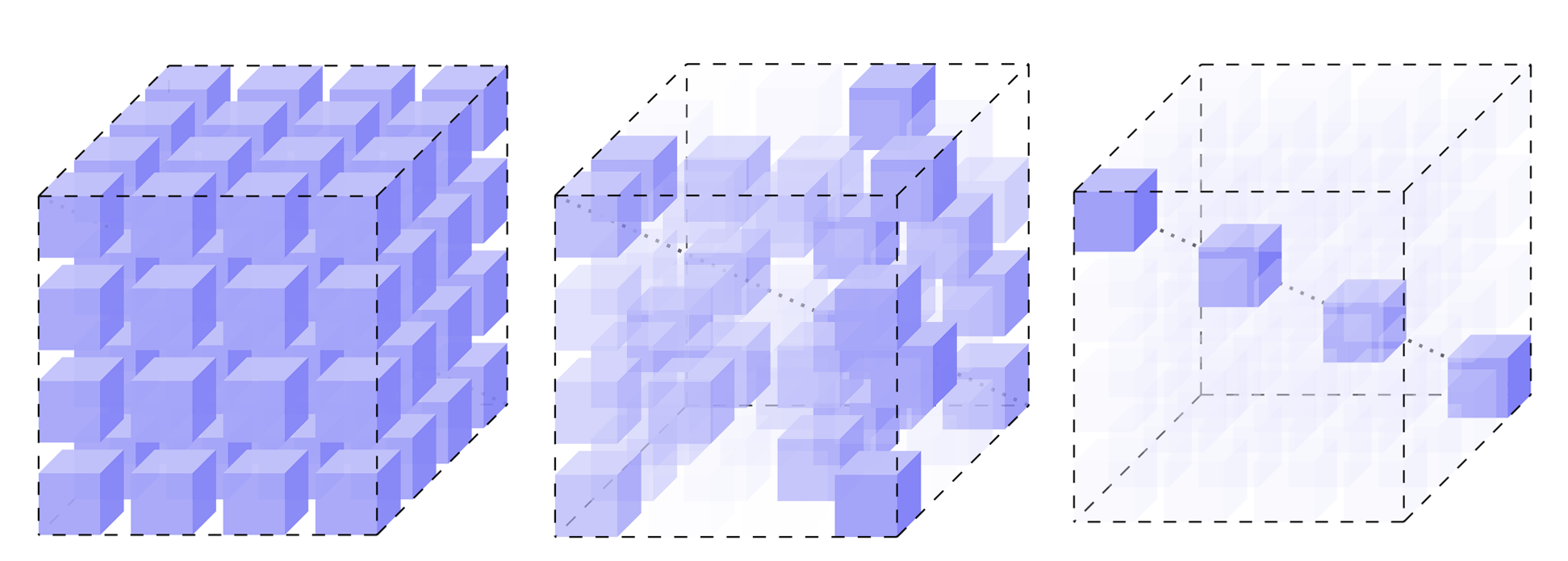
July 2025: Our paper titled “Scalable computation of input-normal/output-diagonal balanced realization for control-affine polynomial systems” was just published in Systems & Control Letters. In this paper, we consider the problem of computing the first part of the coordinate transformation necessary for computing nonlinear balanced truncation models. Our key insight was that the coordinate transformation must make the observability energy function “diagonal”, which has a very nice interpretation for polynomial coefficients which can be reshaped as tensors that resemble hypercubes:
June 2025: I received the award for Outstanding TA of the Year for the Mechanical & Aerospace Engineering department at UC San Diego this year. Thanks to all of my wonderful students in MAE 143B (Undergrad Linear Controls), I had a wonderful experience.
February 2025: I participated in the Advances in Digital Twins workshop at Stanford university. This workshop sought to bring together university and industry experts to have discussions on the state-of-the-art in modeling, simulation, and control for a variety of applications. My work on computational methods for control and model reduction of nonlinear systems can be viewed as contributing to being able to use higher-fidelity models in real-time for these kinds of purposes.
December 2024: I am also excited to be presenting our paper titled “Computing Solutions to the Polynomial-Polynomial Regulator Problem” at CDC Milan 2024. I am very proud of this work, which has produced my flagship PPR GitHub repository ; there you can find the main contribution from my CDC paper, the Matlab function ppr(), which functions analogously to the lqr() function but for nonlinear systems. Also provided is thorough documentation and some examples to get you started. My goal with this function is to make it fast and easy to compute nonlinear controllers with just one line of code, similar to Matlab’s built-in three-letter function lqr(). These controllers are essentially Taylor approximations to the true optimal control, so I always remind the properties of Taylor approximations: you can expect convergence to the true optimal control locally, i.e. better and better performance with higher degree feedback laws, but outside of the (unspecified) region of convergence of the Taylor expansion, these polynomial controllers will typically blow up and likely exhibit poor performance. I typically recommend starting with a degree 4 approximation to the value function, corresponding to a degree 3 optimal control approximation (the classic linear feedback is an odd function, so the next degree odd function is degree 3). In addition to better optimality locally, in some cases these controllers stabilize initial conditions that fail to be stabilized by LQR, although this is not guaranteed.
December 2024: I just finished visiting Prof. Alessandro Alla at La Sapienza, University of Rome. I am very grateful for the opportunity to visit and discuss our common research interests of model reduction and control of dynamical systems. E per chi non lo sapesse, sono metá italiano, quindi é stata una grande opportunita visitare Roma e parlare con alcuni ricercatori italiani molto gentili.
November 2024: Our paper titled “Scalable Computation of H-infinity Energy Functions for Polynomial Control-Affine Systems” was recently accepted to IEEE Transactions on Automatic Control. This paper presents the theory behind using Taylor approximations to compute the energy functions for control-affine dynamical systems with nonlinear drift, input, and output. The associated code can be found here on my GitHub.
October 2024: Happy second birthday to little Millie! Photo credit to Bryn Nilsen.

September 2024: We recently started work on a new multi-university research initiative (MURI) on the mathematics for digital twins. We are interested in using model reduction techniques for nonlinear control, with particular interest in laser powder bed fusion (PBF). This advanced 3D printing, also known as additive manufacturing, technique enables developing very complex part geometries, but many open problems exist regarding the optimization of control parameters such as the laser power, speed, and the path-planning corresponding to the slicing process. In particular, sub-optimal slicing and parameters can cause significant warping and even cracking of printed parts. We hope to advance the use of model reduction to tackle some of these challenges while advancing the broader approach of pairing real-world measurements with computer models, an idea known as digital twins.
September 2024: We had a wonderful time hosting this year’s MORe2024 here in beautiful La Jolla at the Scripps seaside conference venue. I presented the most recent state-of-the-art in computational methods for Nonlinear Balanced Truncation, based on our IEEE Transactions paper on computing energy functions and our recently submitted paper on computing balancing transformations. We always welcome visitors to San Diego and appreciate everyone who took the time to come and discuss/present their research.
August 2024: Our paper titled “Computing Solutions to the Polynomial-Polynomial Regulator Problem” was accepted to CDC 2024. I am excited to visit Milan in December 2024 and look forward to presenting this recent work.
July 2024: I presented my work on computations for nonlinear balancing for polynomial drift systems at ACC 2024 in Toronto. This work, along with the work I presented at SIAM CT last summer, allows us to compute nonlinear balancing energy functions for general control-affine nonlinear systems of arbitrary polynomial degree. All of this work will be published in an upcoming journal paper that is currently in the review stages.
March 2024: Our paper titled “Scalable Computation of H-Infinity Energy Functions for Polynomial Drift Nonlinear Systems” was accepted for ACC 2024. I am excited to visit Toronto and present this work in July! I also just submitted a paper titled “Computing Solutions to the Polynomial-Polynomial Regulator Problem” to CDC 2024; this represents an exciting connection between our model reduction work and a more general optimal control problem. I hope to present this in Milan in December!
February 2024: My advisor Prof. Boris Kramer is organizing this year’s Model Reduction and Surrogate Modeling (MORe) conference here in San Diego this September 9-13, 2024. I just submitted an abstract, and I look forward to having our wonderful research community here to visit later this year to share all of the exciting research developments!
October 2023: Happy first birthday to my wonderful crazy little dog.



August 2023: I am planning to attend ACC 2024 in Toronto next year to present more of my work on computations for nonlinear balancing; I will present a generalization of my work to compute energy function approximations for systems with polynomial drift dynamics. I will also be visiting Blacksburg again in December 2023!
July 2023: I presented my work on computations for nonlinear balancing for polynomial input systems at the SIAM Conference on Control and Its Applications in Philadelphia.
May 2023: Had a great time at the Nonlinear Model Reduction for Control workshop at Virginia Tech presenting my work on computations for nonlinear balancing for polynomial input systems. It was great to have our community together in Blacksburg!
January 2023: Happy New Year! This year I’m excited to be attending the Nonlinear Model Reduction for Control workshop at Virginia Tech May 22-26th, and I also hope to attend the SIAM Conference on Control and Its Applications in Philadelphia in July.
June 2022: I survived the first year of my PhD program! I took some wonderful control theory classes which UCSD’s mechanical engineering department has to offer, along with some really stimulating math classes the department offers such as real and functional analysis. I also passed my Department Qualifying Exam (DQE). Many thanks to my advisor Prof. Boris Kramer and my committee members Prof. Patricia Hidalgo-Gonzalez and Prof. Jorge Cortes. In the coming weeks, I will be taking a small vacation to Italy to visit family and recover from a challenging year of courses.
March 2022: I just returned from attending the 2022 Spring School on Theory and Applications of Port-Hamiltonian Systems at the beautiful island of Fraueninsel (Chiemsee), Germany. It was a wonderful opportunity to learn about port-Hamiltonian systems, and I met a lot of wonderful colleagues whom I hope to see again in the near future!

January 2022: I’ve been accepted to the 2022 Spring School on Theory and Applications of Port-Hamiltonian Systems, which I am excited to attend. The workshop will take place March 20-25 in Fraueninsel (Chiemsee), Germany (pictured below).

September 2021: I’ve moved from Virginia Tech to San Diego to pursue a PhD in Mechanical and Aerospace Engineering at UCSD with Prof. Boris Kramer.
July 2021: I completed my master’s thesis defense! Many thanks to my advisor Prof. Pablo Tarazaga and my committee members Prof. Shane Ross and Prof. John Domann.

February 2020: I will be giving a talk at the 38th International Modal Analysis Conference, in Houston, Texas. In my presentation, I will share some results from finite element simulations I have been using to study low-frequency wave propagation in rails for measuring stress non-destructively.
February 2019: I will be giving a talk at the 90th Shock and Vibrations Exchange, in Atlanta, Georgia. In my presentation, I will share a new method which Kameron Mize, Dr. tarazaga, and I have worked on to facilitate projection-based component vibration testing.